Spring applied power-off (or fail-safe) brakes are used in applications that require the axis to stay in position, even if the machine loses power or is turned off. Brakes are a great option for vertical applications or when additional safety measures are required.
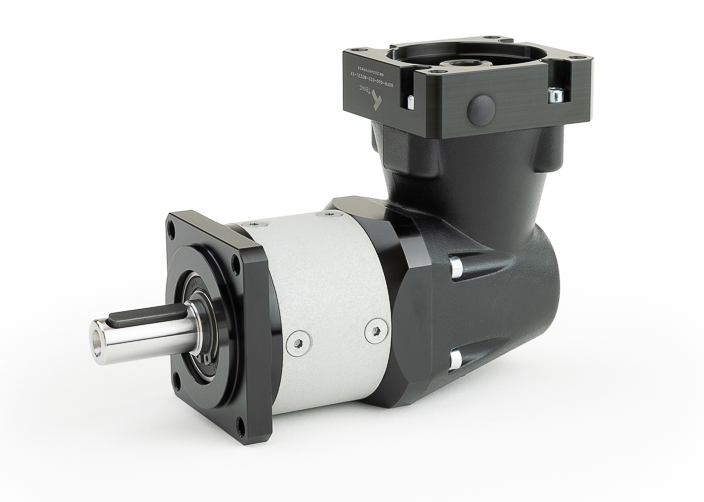
Front mount compatible with any NEMA 23 or NEMA 34 motor frames
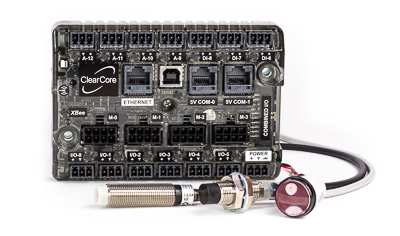
The Amazon™ Intelligent Power Center (IPC) is designed and built specifically for motion control applications.
High output capacitance and built-in regen control system prevents over-voltage shutdowns and the need for external regeneration control and load resistor
High peak power drastically reduces power supply droop during motor acceleration
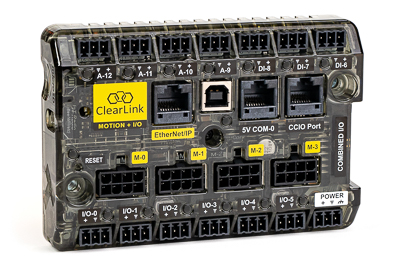
ClearLink is an industrial I/O and motion controller, compatible with any EtherNet/IP scanner. Use ClearLink to control position, velocity, and torque applications.
Products that are eventually displaced by the introduction of new technology are not simply discontinued—the components continue to be manufactured and supported for as long as parts are reasonably available.
In many motion systems, there are two big benefits of using gear reduction: torque multiplication and inertia reduction. In this article, we'll discuss what planetary gearboxes are and how to take advantage of them to improve the design and performance of your system.
Abe Amirana Senior Engineer
Torque Multiplication
Many industrial applications do not require the full motor output speed to get the desired speed at the driven mechanism. In these cases, by using a gearbox, you can gain extra torque by trading the unneeded motor speed. A gear reducer both multiplies the output torque (minus some efficiency losses) and divides the input speed by the reduction ratio. For example, a 10:1 gearbox produces almost ten times more output torque while the gearbox output speed is 1/10 of the motor input speed . If the motor you are using can spin at full torque at 3,000 RPM (common for servo motors) and you only need 600 RPM to move the load at the desired speed, you can use a 5:1 gearbox to get five times as much motor torque.
This matters because torque is the ability to overcome inertia, friction, and external forces in the load. Without sufficient torque, a motor may stall, fail to accelerate quickly enough, or struggle to hold position under load. By adding gear reduction, you make the system more robust and allow the use of a smaller motor than would otherwise be required.
Additionally, because gearing multiplies motor torque, the torque needed from the motor is reduced, and motor heating is greatly reduced. This is important because for brushless motors (most servos and all steppers), the main aging factor is heat—it accelerates the rate with which the winding insulation and bearing grease break down. So, reducing heat leads to higher reliability as well as better efficiency. This is because in most applications, the primary heat generation in the motor is due to resistive copper losses. Current flowing through any conductor (such as motor windings) is subject to "i2R losses", which heat the motor. And this heating is proportional to the square of the current (and current is proportional to torque). So, for example, we can cut the current by about a factor of five by using a 5:1 gearbox, and thereby reduce the copper losses by a factor of 25. Note that the motor heat is not reduced by quite such a large margin because the faster-spinning motor has additional speed-related losses. However, because the copper losses predominate, the motor heating is still greatly reduced.
Reflected Inertia Reduction and System Bandwidth
A second big advantage of gear reduction is its effect on the load inertia “seen” by the motor. If a motor is directly coupled to a load, 100 percent of the load's inertia is “reflected” back to the motor. A large mismatch between motor inertia and load inertia makes it difficult for a motor to maintain control. In servo systems with excessive reflected inertia, settling time tends to increase, disturbance rejection is reduced, and tuning becomes more difficult and sensitive. In stepper motor systems, it is more likely that the stepper will lose steps or stall, and the system will be less reliable in the face of slight changes to the system's friction or load over time.
A gear reducer changes this relationship: the reflected inertia seen by the motor is the load inertia divided by the square of the gear ratio. For instance, with a 5:1 reduction, the motor perceives only 1/25th of the load's actual inertia. This dramatically improves the motor's ability to accelerate, decelerate, and settle into position. Changes in the system during normal operation and over time are greatly minimized by more gearing, leading to more robust designs.
So, if you need more torque or have a large inertial load, gearing is an excellent consideration. And, in the world of gearing options, planetary gearboxes offer a host of advantages.
How Does a Planetary Gearbox Work?
A planetary gearbox has four main parts: the sun gear, planet gears, ring gear, and carrier. The sun gear, at the center, receives power from the motor. Surrounding it are three or more planet gears that spin on their axes while orbiting the sun, meshing with both the sun and the internal ring gear, which usually remains fixed. The carrier holds the planets evenly around the sun and typically serves as the output shaft, producing low-speed, high-torque rotation.
The coaxial layout keeps the drivetrain compact and balanced. Because the planets are evenly spaced, their forces cancel, reducing radial loads and allowing smaller bearings. With multiple gears engaged at once, torque is shared among many teeth, so smaller gears can handle high loads. Adding more planets further boosts stiffness and load capacity.
Since the planets roll rather than slide, friction losses are low and efficiency is high. The planetary design combines compactness, strength, and precise in-line motion—ideal for space-limited, high-torque applications.
When the sun gear is the input and the ring gear is fixed, the planet gears roll between them, turning the carrier at reduced speed. The gear ratio is determined by the tooth counts of the sun and ring gears:
Gear Ratio = 1 + (Ring Gear Teeth / Sun Gear Teeth)
For example, a 16-tooth sun and a 48-tooth ring produce a 4:1 reduction—the carrier turns once for every four revolutions of the sun.
Planetary Gearbox Advantages and Disadvantages
Engineers choose planetary gearboxes because they provide numerous mechanical advantages, in addition to torque multiplication and reduction in reflected inertia:
The dynamic torque-speed curve above demonstrates the dramatic output torque increase achieved by adding a 3:1 precision gearbox to a NEMA23 ClearPath servo motor. As you can see upon clicking the button above, the gearbox transmits several times the motor's native torque.
High Efficiency: Planetary gears operate mostly in rolling contact; friction losses are low and efficiencies often exceed 95 % per stage. And, unlike other gearing technologies, the balanced planetary design also reduces vibration and noise because multiple gear teeth mesh simultaneously. These characteristics make planetary gearboxes well-suited to servo systems, where responsiveness and smooth operation are critical.
Wide Gear Ratio Range: Planetary gearboxes offer the widest range and selection of gear ratios. There are a host of widely available options from 3:1 to 100:1, and manufacturers can add even more internal gears to create gearbox ratios up to 1000:1! The higher ratios are achieved by stacking additional gear stages; each additional stage multiplies the overall ratio by the reduction of the preceding stage while maintaining the coaxial layout. This versatility allows designers to tailor the output speed and torque to the application without changing the motor.
Improved Resolution: Because a gearbox divides the motor's rotation, the output moves more finely, effectively increasing the system's resolution by the gear ratio. A 3:1 reducer triples the angular resolution at the output shaft.
There are, however, some disadvantages to consider if and when choosing a gearbox.
Increased Space Requirements: Although planetary gearboxes offer excellent torque density, they, like all gearboxes, do add length to an assembly (you can often decrease motor size, which reduces this effect).
Backlash and Compliance: All gearboxes add some amount of mechanical error within a system, so it's incumbent upon a design engineer to review and analyze the backlash specification of a gearbox. Gearboxes can be manufactured with tighter tolerances on the internal gears, thereby enabling a lower backlash specification. As you might expect, there is a price premium for this increase in gearbox accuracy. In general, however, standard planetary gearboxes are better than most other types of gearboxes in regard to backlash and compliance.
Noise and Vibration: Like any gear mesh, gearboxes produce some level of speed-dependent audible noise and vibration within a system.
Cost: As with any precise gear mesh assembly, gearboxes add cost to a system. Engineers can often select smaller motors with a gearbox thereby negating some of this cost.
When properly selected and integrated, these advantages explain why planetary gearboxes are widely used in industrial automation, robotics, printing, packaging and other motion-control applications.
Planetary Gearbox Types and Variants
Planetary gearboxes are available in different configurations, and the optimal choice depends on the required reduction ratio, available space, and performance needs.
Single Stage vs. Multi-Stage
A single-stage planetary gearbox consists of one sun gear, one ring gear, one carrier, and a set of planet gears. With all gears meshing in one stage, these units are compact and efficient, typically offering reduction ratios from about 3:1 to 10:1. Their high efficiency (often above 95%) and low backlash make them suitable for applications that need moderate reduction and high torque density, such as servo systems and robotic joints.
When higher reductions are required, designers use multi-stage planetary gearboxes, which stack two or more stages in series. The overall ratio is the product of each stage's reduction (e.g., two 7:1 stages provide a 49:1 ratio). Adding stages slightly lowers efficiency (to roughly 85–90%) and increases gearbox length, but it enables ratios in the hundreds or even thousands.
In-Line vs. Right-Angle
In an in-line (coaxial) planetary gearbox, the input and output shafts share the same axis. This arrangement provides high efficiency, high torque density, and minimal backlash. It is especially useful in robotics and automation equipment where space is limited and precise alignment is required.
A right-angle planetary gearbox changes the axis of rotation by 90 degrees using a bevel or similar gear set before the planetary section. Right-angle gearboxes solve space and packaging problems where the motor and load cannot be aligned on the same axis.
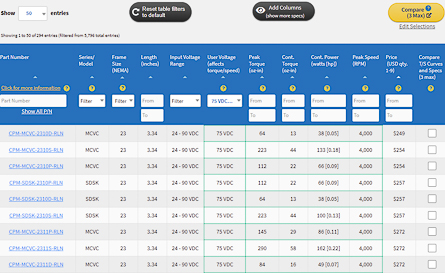
Selecting the Best Planetary Gearbox for Your Application
Selecting the right planetary gearbox is an essential part of system design. The gearbox and motor work as a single system, so one cannot be sized properly without considering the other. A gearbox increases output torque in proportion to its ratio but reduces speed by the same factor. If the ratio is too high, the system may respond sluggishly and lose throughput. If the ratio is too low, the motor may not generate enough torque to accelerate the load or maintain stability. The goal is to balance torque amplification with speed to achieve both optimal cycle times and accurate positioning.
Key Considerations
Required ratio and inertia reduction: Choose a ratio that provides adequate torque multiplication without overly restricting motor speed. Use the square of the gear ratio to verify that reflected inertia stays within the motor's torque and acceleration limits.
Physical space and frame size: Gearboxes add length to the drivetrain. Confirm that the frame size (e.g., NEMA 23, 34, or metric equivalents) matches the motor and fits within the available space. Multi-stage gearboxes are longer than single-stage units.
Torque demands: Analyze the load profile to identify the continuous torque, the peak torque (for acceleration), and the emergency stop torque requirements. Ensure the gearbox's ratings exceed these demands with an adequate safety margin. Duty cycle and thermal limits may require larger gearbox units or cooling solutions in demanding applications.
Radial and axial loads: Although gearboxes generally have oversized output bearings, one should account for belt tension, misalignment, gravity, or thrust forces acting on the output shaft. Compare your requirements against the gearbox's specifications, and use external support bearings if needed.
Gearbox type: Select between single-stage, multi-stage, in-line, or right-angle designs based on layout and ratio requirements. Each option has trade-offs in size, efficiency, accuracy, and configuration.
Backlash and stiffness: Even precision gearboxes introduce some backlash and compliance. Compare manufacturer ratings with your positioning tolerances and select the stiffest option practical for your design.
Noise and vibration: At higher speeds, gear meshing can create noticeable audible noise. If applicable, review the dB gearbox ratings and consider reducers with precision-cut gears.
Environment and lubrication: Factor in temperature, duty cycle, and service needs. Many housed planetary gearboxes are sealed and lubricated for life, while others require periodic grease or oil maintenance.
Choosing a planetary gearbox goes beyond matching torque and speed. Consider duty cycle, load conditions, environmental factors, precision requirements, and service life. Online tools and calculators can help narrow options, but consulting with a Teknic applications engineer often ensures the most reliable match. Contact us with questions or details about your application.
Conclusion and Next Steps
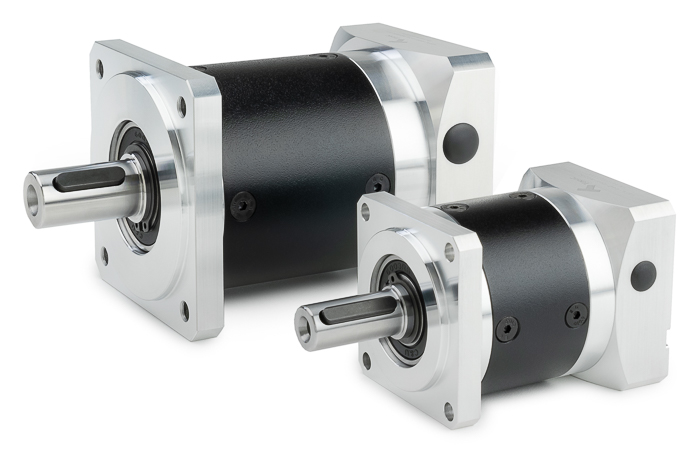
Planetary gearboxes offer high torque density, efficiency, and precision in a compact form, making them valuable across a wide range of applications such as automation, robotics, packaging, CNC equipment, and laboratory automation. Their design—sharing load across multiple gears on a coaxial axis—provides both strength and space savings.
Selecting the right gearbox is part of the motor sizing process, not an afterthought. Engineers must weigh torque multiplication against speed reduction, match inertia, and review factors like axial/radial loads, backlash, stiffness, and available space. Properly matched to a servo motor, a planetary gearbox improves acceleration, resolution, and load handling.
To ensure the best outcome, review gearbox specifications, use sizing tools to compare ratios and torque ratings, and consult application engineers when needed.
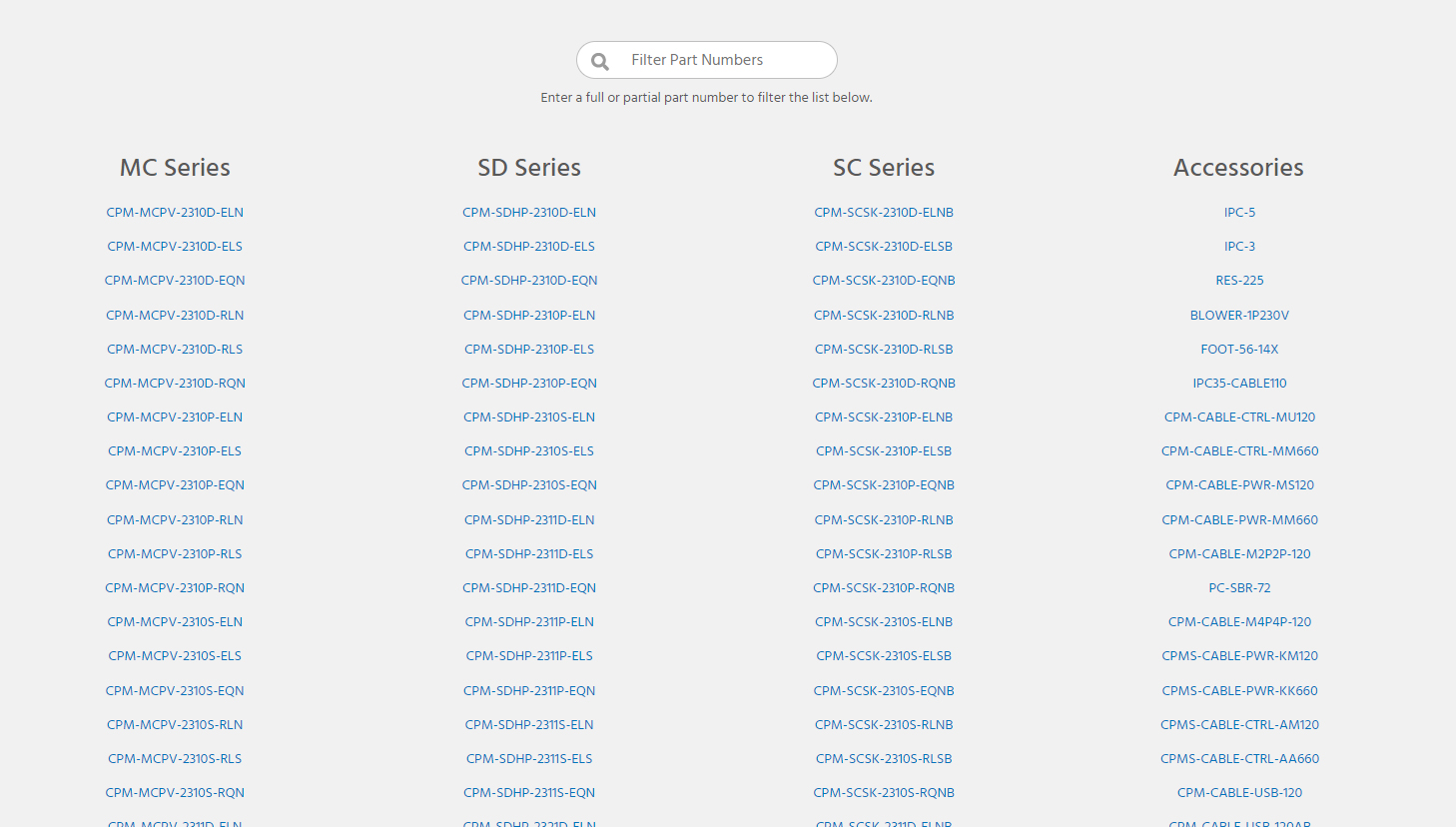
Teknic gearboxes
Teknic's planetary gearboxes are compatible with NEMA 17, 23, 34, 56, and 143 motors. Buy online; 90-day satisfaction guarantee. 3-day shipping for select models.
To speak directly with one of Teknic's experienced factory-direct engineers, fill out the brief contact form linked below and we will contact you soon.
Join over 60,000 engineers for motion articles, product updates, and more.
Share / Save Cart
We use cookies to ensure the best possible user experience on our website. You can read a clear explanation of exactly how we use cookies in our privacy policy.OK