Powerful and easy-to-use diagnostic tools
Automated machines are complicated. Software, mechanics, motors, I/O, and lots of interaction between them all. It's essential to have good diagnostic tools to help locate the source of problems and to verify proper design margin. Eclipse drives have a wealth of diagnostic tools.
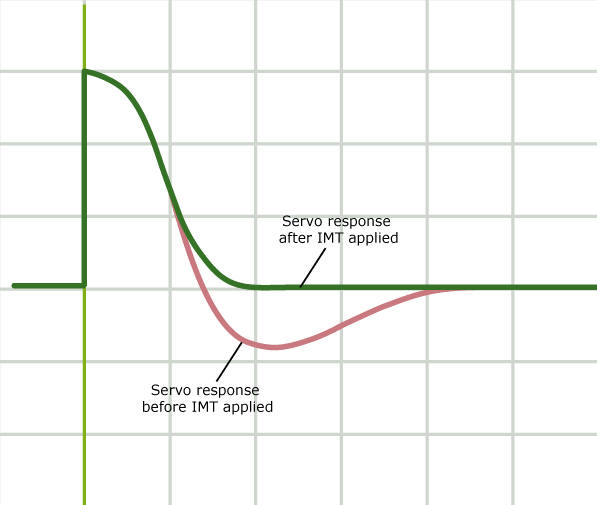
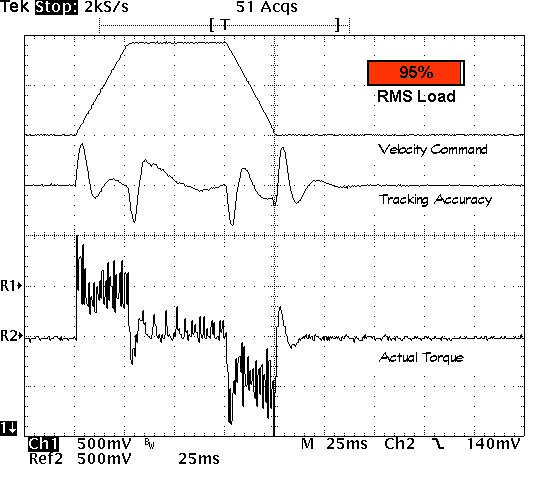
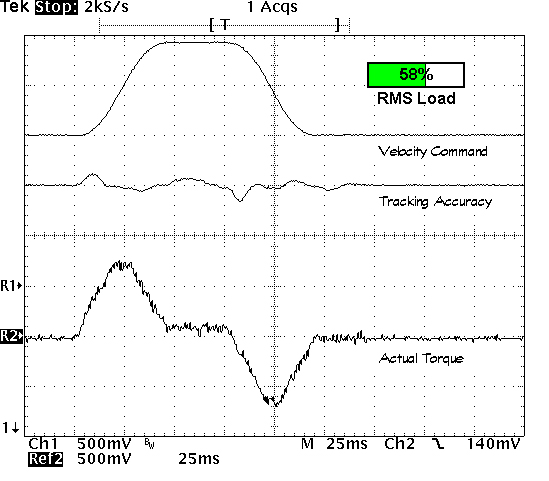
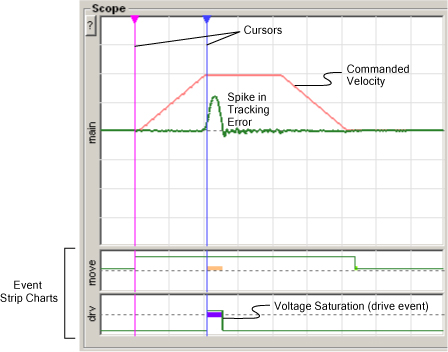
The main tool is a full-featured soft scope that allows you to visualize just about any variable relevant to motion control. Look at motion profiles, torque usage, tracking accuracy, voltage headroom, and many other important variables. Event strip charts show exception events (like torque saturation, voltage saturation, speed limits, shutdowns, etc.) time-aligned with your selected variable. Sophisticated trigger modes allow precise and selective triggering.
Together, these features make it easy to diagnose problems, whether servo related, software, or mechanical.
Eclipse is also capable of converting any scope variable to an analog signal to allow the use of an external measuring device such as a data logger or oscilloscope. This feature can be very handy to correlate servo events with other electrical events in the machine (e.g., power supply fluctuations, analog or digital I/O, etc.)
All drive shutdowns (for example, over-voltage or short-circuit protective shutdowns) are supported with helpful hints that suggest the likely cause of the problem. Shutdowns are also logged for future reference. And comprehensive, built-in self-test features verify proper operation of the drive.