

















Texas Instruments (TI) is a pioneer in the semiconductor industry, notably for its Digital Light Processing (DLP®) technology. At the heart of this technology are Digital Micromirror Devices (DMDs), highly complex MEMS chips containing millions of microscopic mirrors used in cinema projection, automotive displays, and advanced light control applications.
ClearPath All-In-One Servos
ClearPath Overview
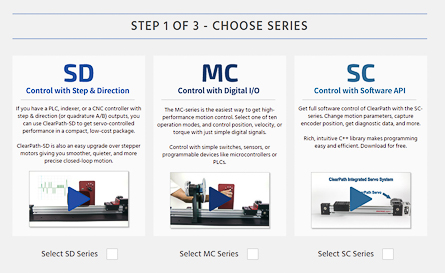
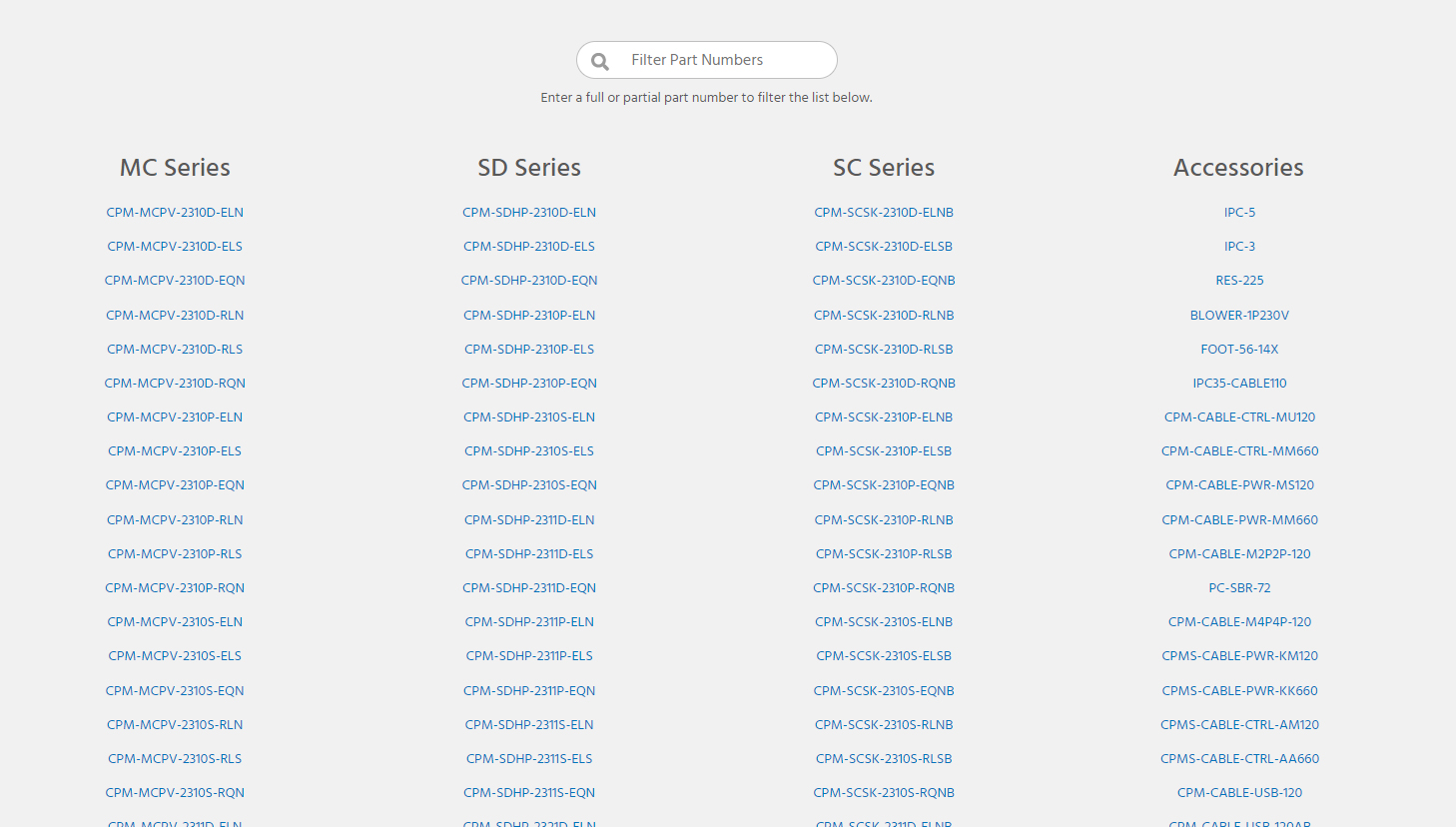
Choose Series
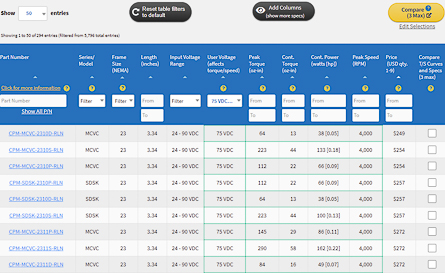
Motor Selection Guide
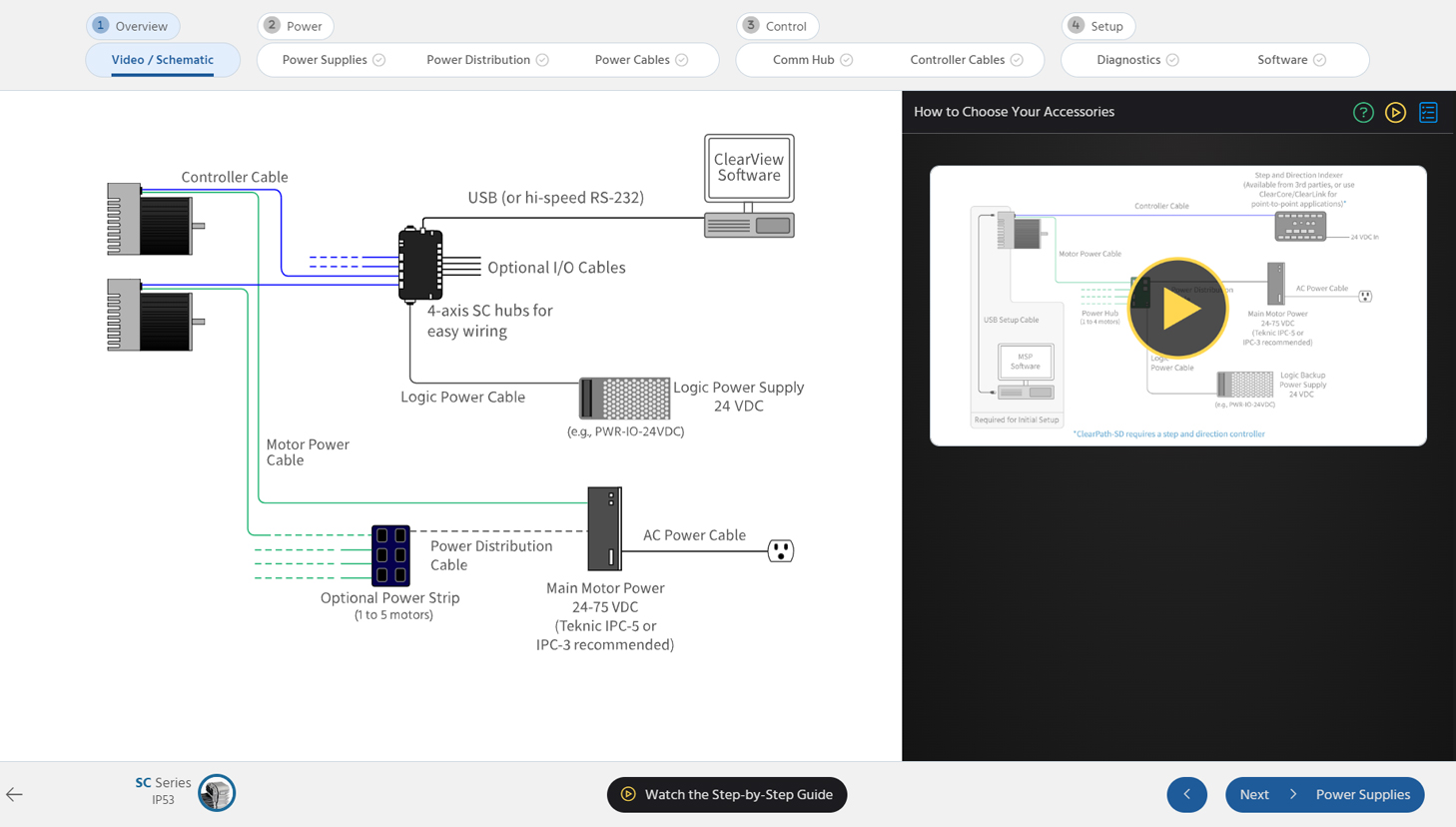
Accessories Guide
Motor Specs
Index: All Motors/Accessories
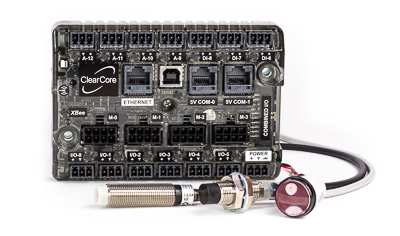
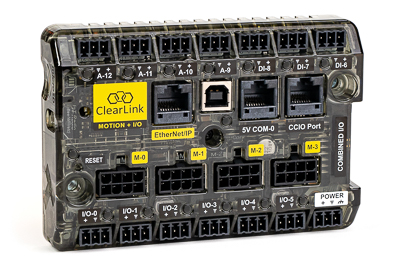
ClearCore I/O & Motion Controller
IPC DC Power Supplies
Hudson BLDC Servo Motors
Meridian Integrated Controllers
Eclipse Digital Servo Drives
Motor Brakes
Planetary Gearboxes
Other Products
