

















QuidelOrtho is a preeminent name in the in vitro diagnostics industry, providing laboratories globally with scalable solutions to improve patient outcomes. A cornerstone of their technology portfolio is the VITROS® family of systems, including the XT 7600 Integrated System, which uses proprietary dry-slide technology to run clinical chemistry and immunoassay tests with high throughput and accuracy.
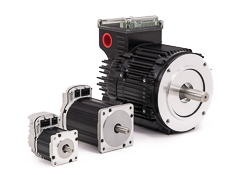
ClearPath All-In-One Servos
ClearPath Overview
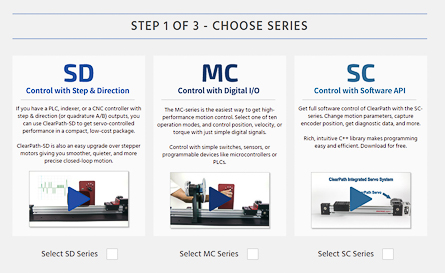
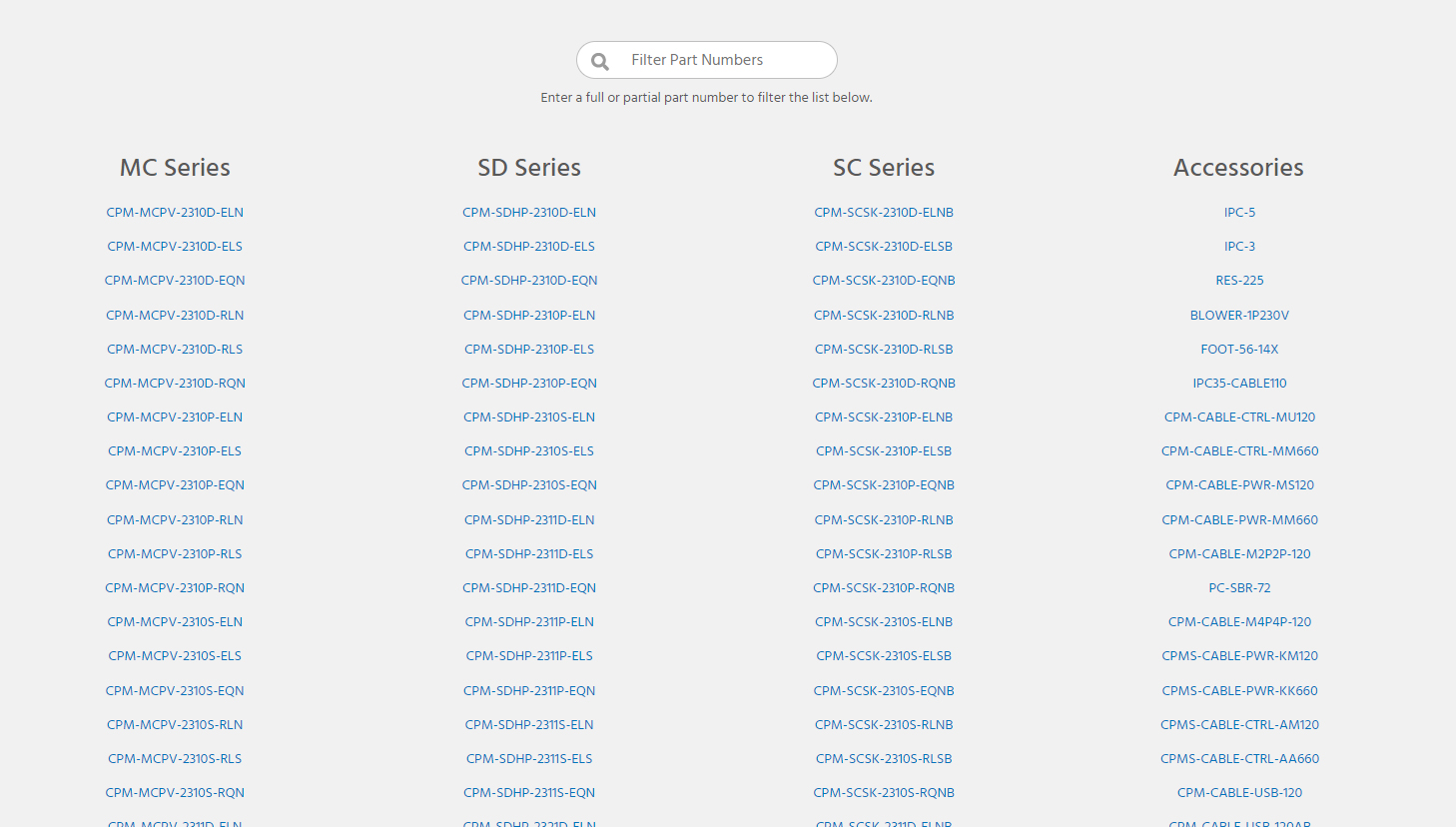
Choose Series
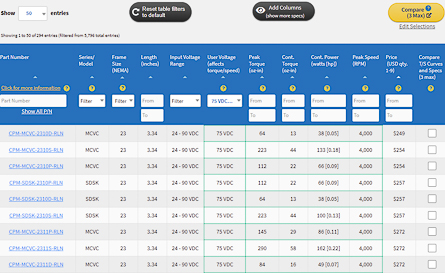
Motor Selection Guide
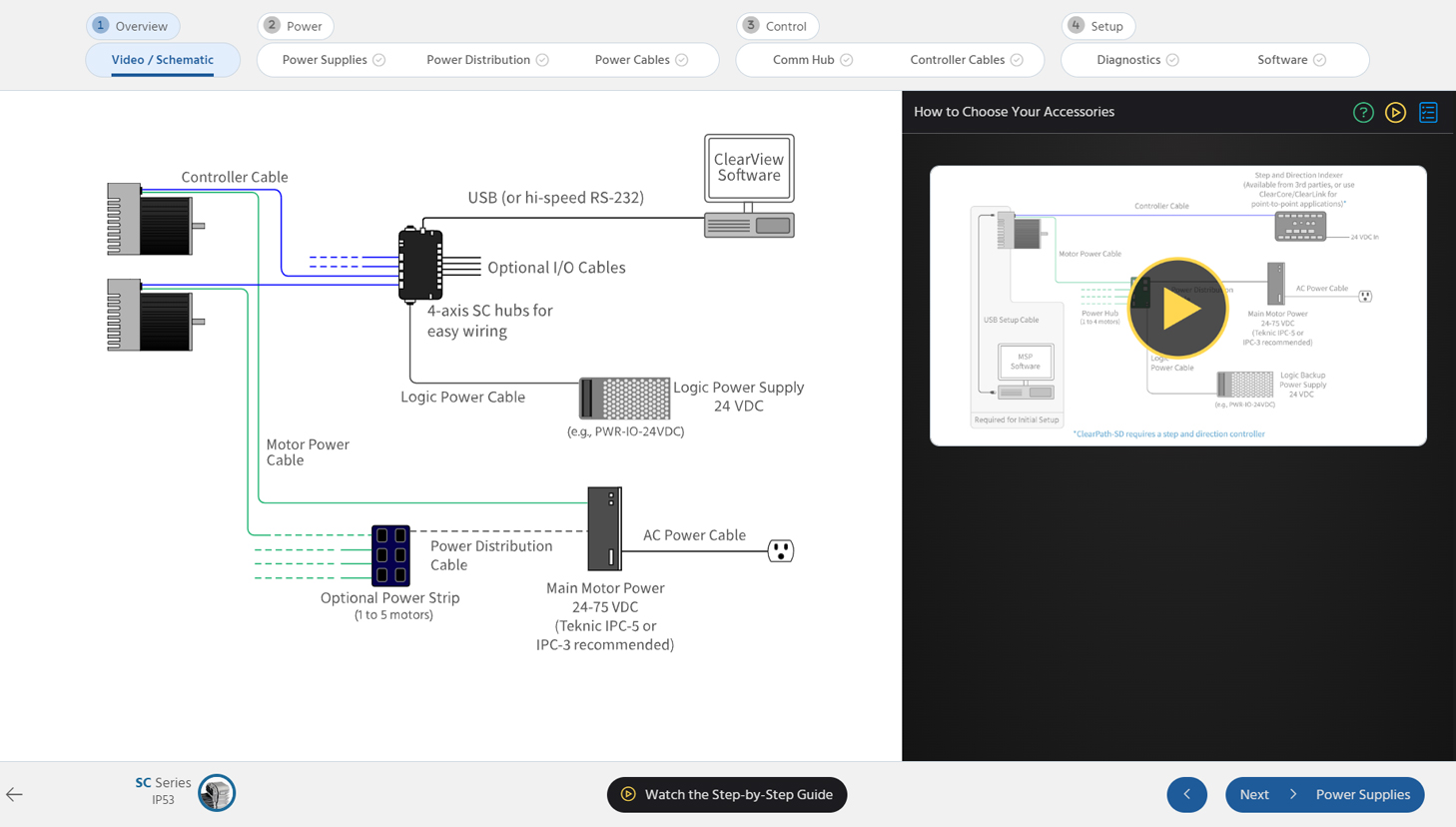
Accessories Guide
Motor Specs
Index: All Motors/Accessories
ClearCore I/O & Motion Controller
IPC DC Power Supplies
Hudson BLDC Servo Motors
Meridian Integrated Controllers
Eclipse Digital Servo Drives
Motor Brakes
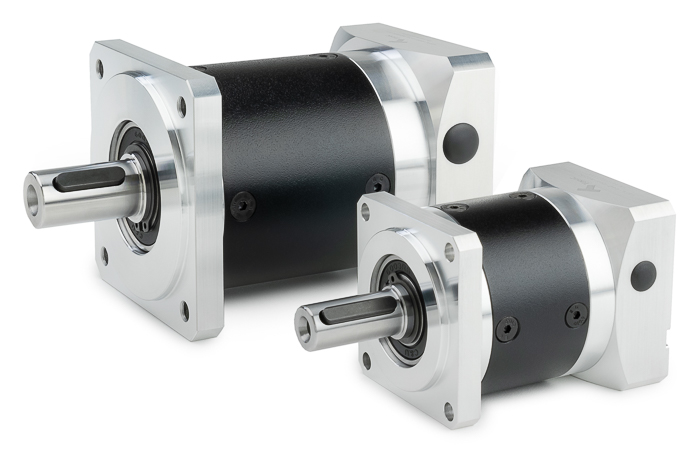
Planetary Gearboxes
Other Products